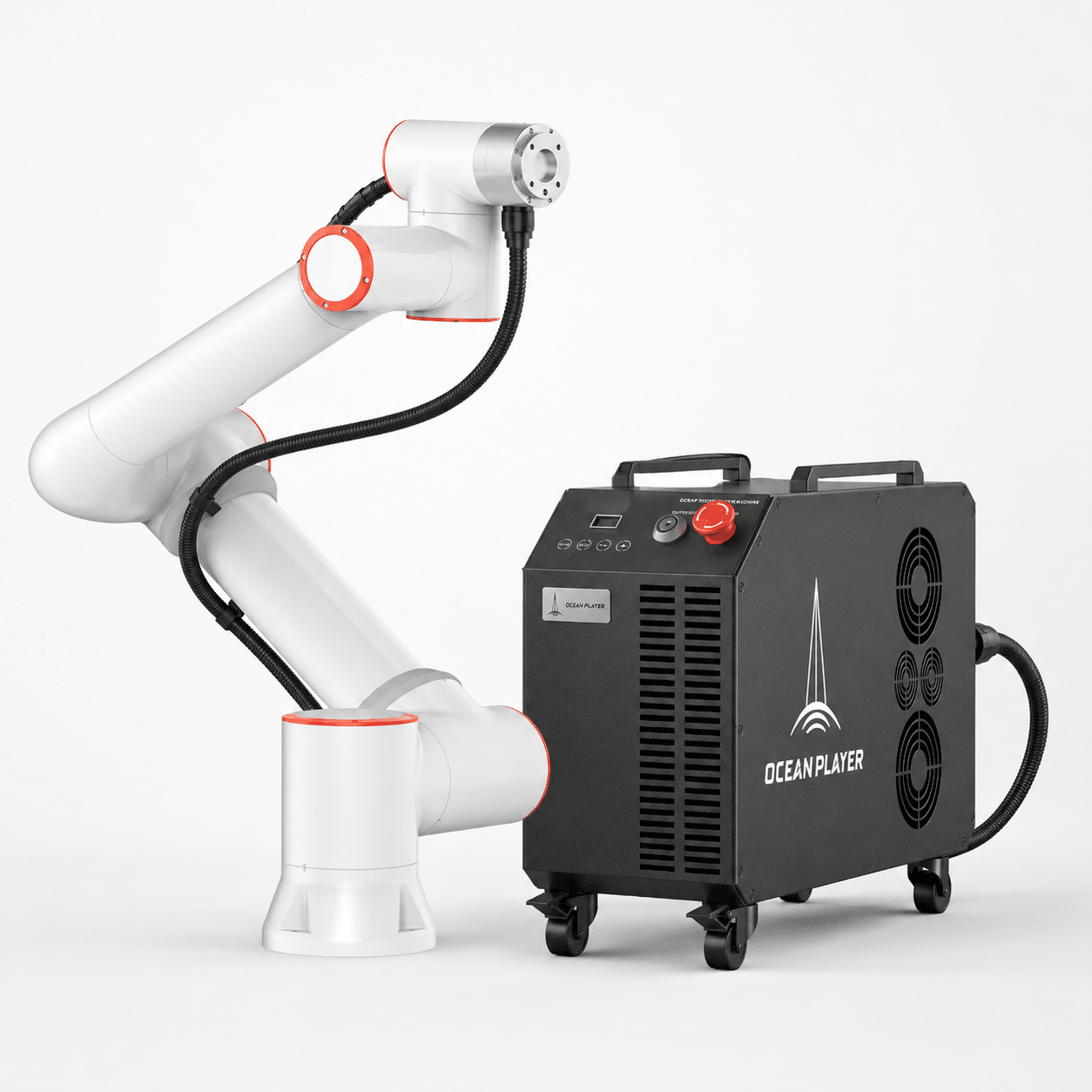
Robotic Laser Cleaning System for Automated Rust, Oxide and Surface Preparation.
Oceanplayer robotic laser cleaning systems combine fiber laser cleaning, robot motion, fixtures and safety integration for repeatable surface treatment. They are built for factories that need stable cleaning quality, controlled cycle time and less manual variation on metal parts.
Where robotic laser cleaning brings the most value
This setup fits repeated industrial parts where cleaning quality, cycle time and operator consistency affect downstream production.
- Pre-weld cleaning for automotive, machinery and metal fabrication parts
- Oxide, oil film and coating removal before welding, bonding or coating
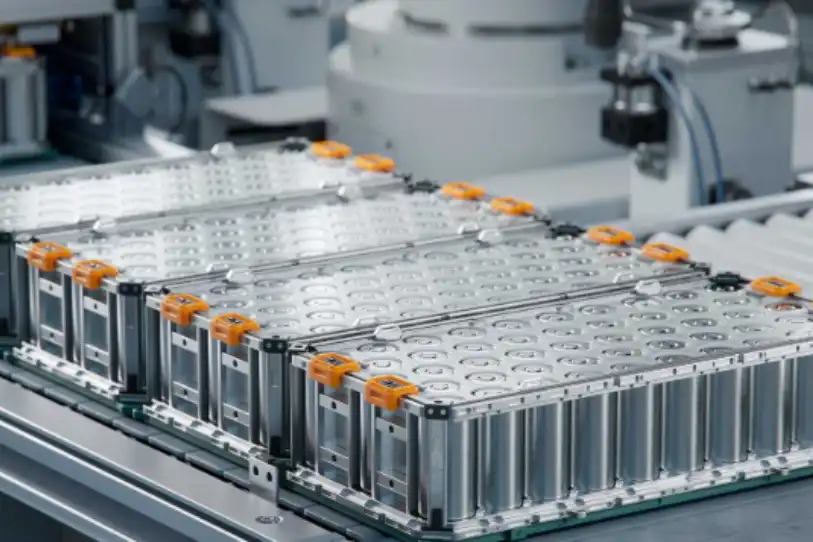
- Battery tray, automotive part, rail component and equipment part cleaning
- Mold, fixture, casting and precision part surface preparation
- Localized paint or coating removal on repeated production parts
- Cleaning cells for factories that need stable takt time and less manual labor
Confirm automated cleaning quality on your actual part
Sample testing helps confirm cleaning width, edge quality, heat effect, cycle time and whether the robot path can cover the required areas.

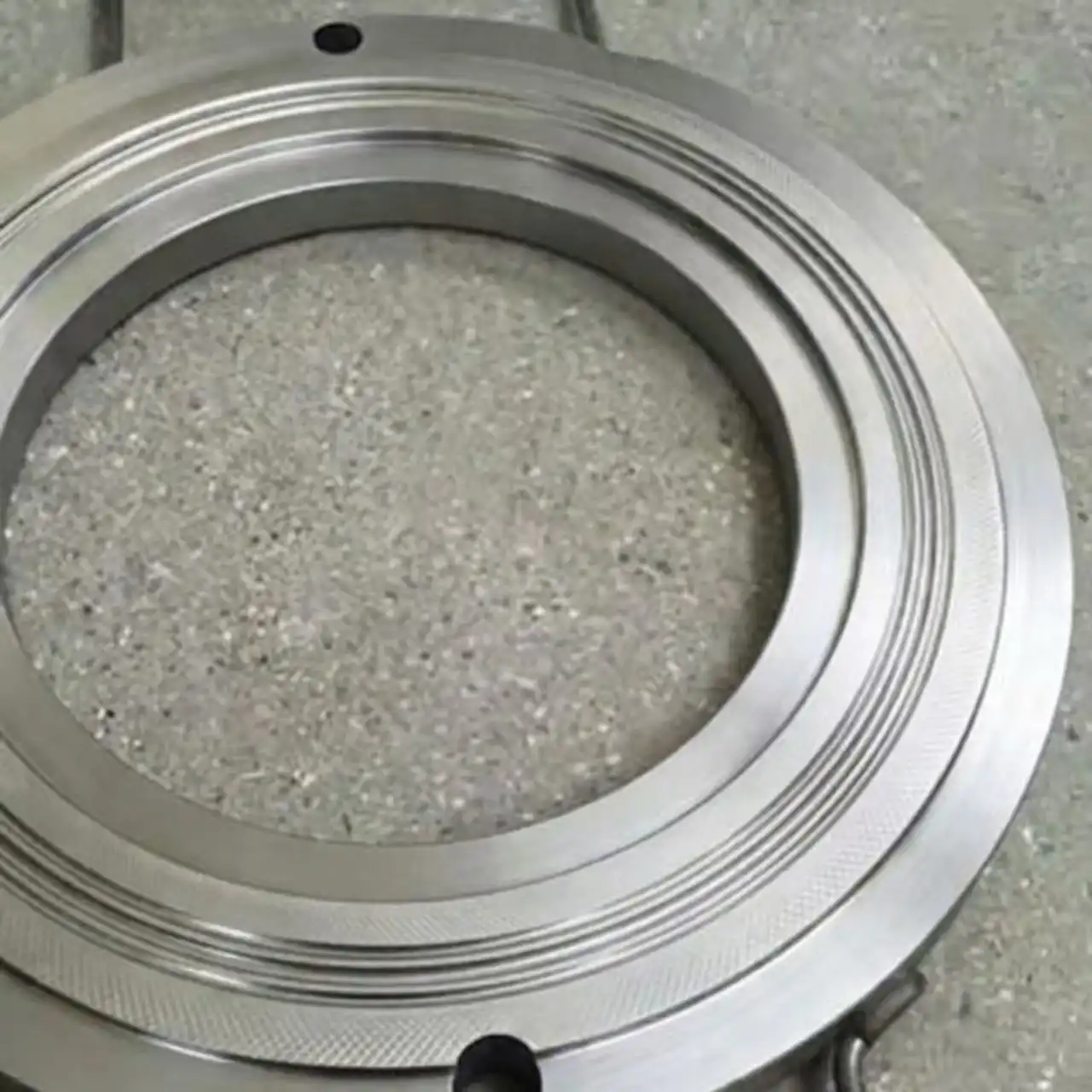
Surface contamination creates unstable downstream results
Rust, oxide, oil film and coating residue can reduce welding, coating, bonding or inspection reliability.
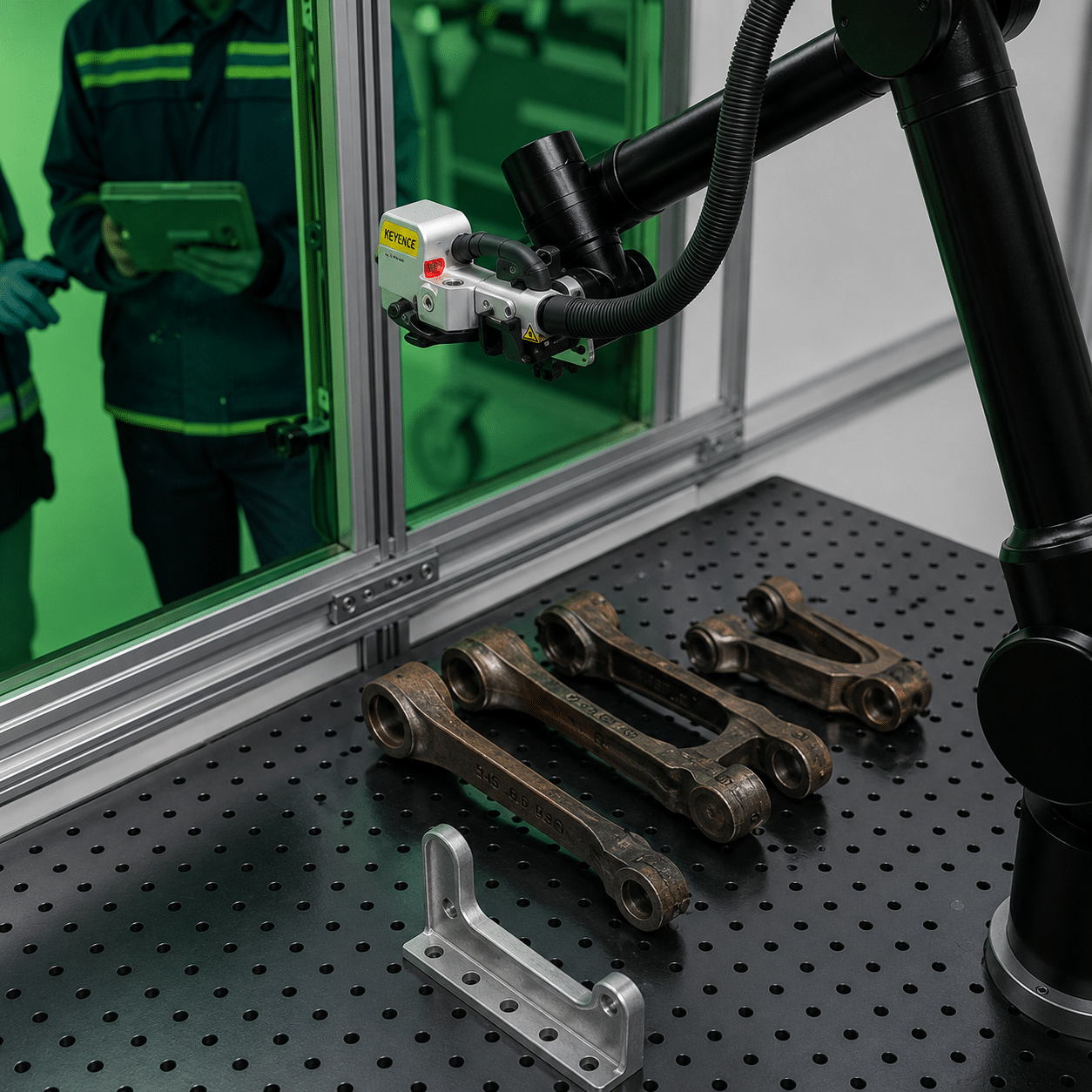
Repeatable surface preparation for production parts
Robotic laser cleaning can deliver consistent cleaning paths and surface results for repeated industrial parts.
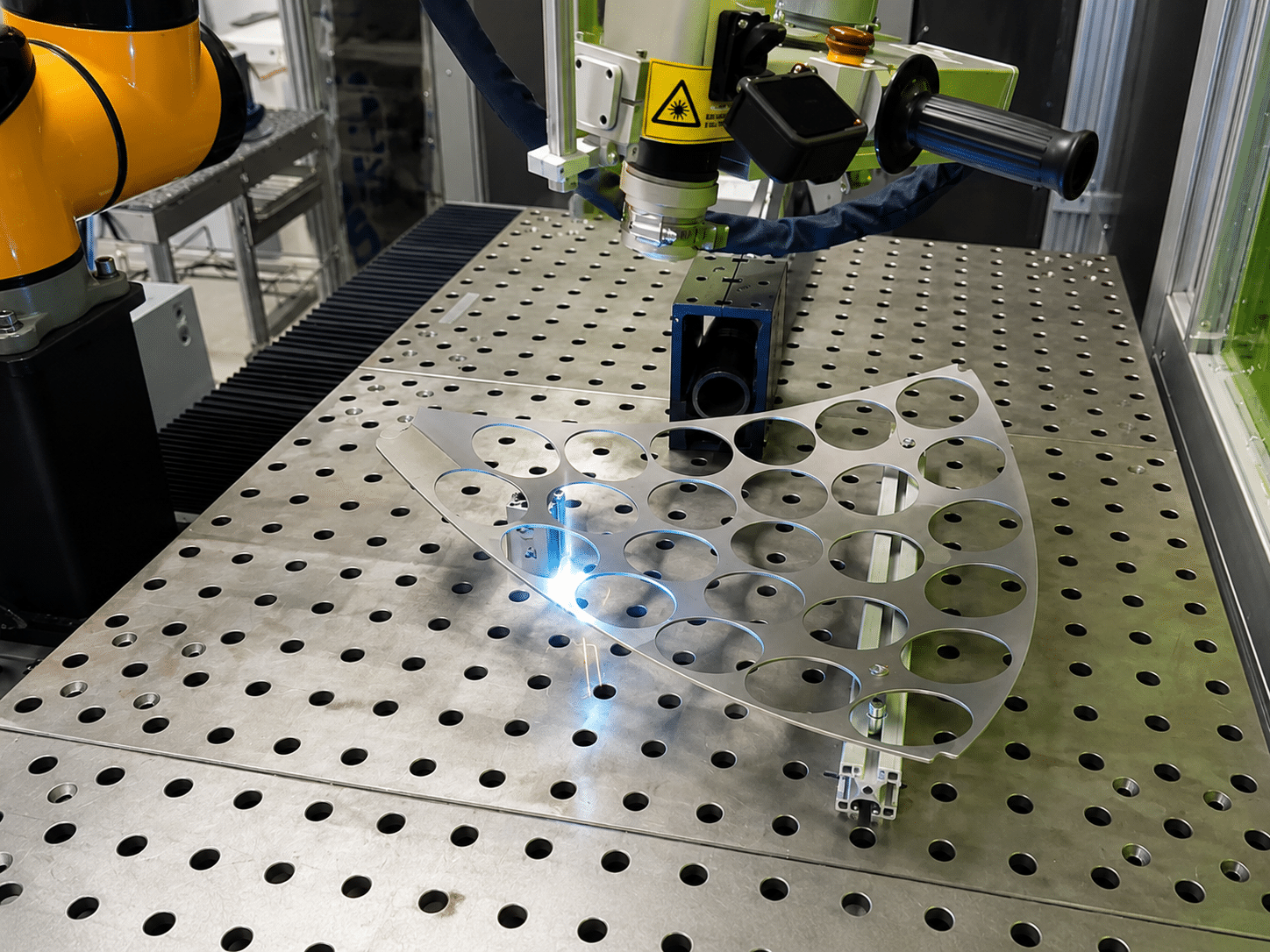
Review robotic cleaning applications for different production parts
Project photos help you evaluate cleaning access, fixture design, robot movement and final surface result before confirming the system layout.





Oceanplayer supports robotic cleaning from sample test to system configuration
Get support for material testing, process parameters, robot concept, fixture planning, enclosure options, export packing and remote technical guidance.